24V / 0.6Nm / 2,292rpm / BLDC / RS-485 / マルチターンエンコーダー 【特徴】 ・高性能フレームレスモーター ・多回転アブソリュートエンコーダ ・安全のための統合電気ブレーキ ・中空軸によるコンパクト&シンプルなデザイン ・ダイナミックモーターコントローラー 【商品説明】 YM080-230-M001-RHには減速機は含まれておりませんので、減速機など様々な製品と組み合わせてご利用いただけます、リニアアクチュエータ・サーボシリンダなど、用途に応じて様々な製品との組み合わせが可能です。 【パッケージ構成】 ・YM080-230-M001-RH ×1 ・Robot Cable-2P-X4P 600mm(Convertible)×1 ・Robot Cable-2P 600mm×1 ・Cord End Terminal×4 ・Terminal Plug×2 ・Wrench Bolt WB M2X6×10 ・Wrench Bolt WB M3x8×10 【納期】 約2ヶ月(受注生産)
243,200 ~
|
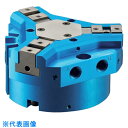
 337761 北川鉄工所 北川 平行中空ロボットハンド(3爪) 〔品番:NTB311〕 [本体質量:1.2kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●大貫通穴により治具取り付けに最適です。●切粉対策強化とメンテナンス性の向上を実現しています。●高把持力で重量ワークも安定した把持が可能です。●高剛性ボディー採用により把持精度向上を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):1750●把持力閉側(N):1510●動作ストローク(mm):16●幅(mm):121●奥行(mm):121●高さ(mm):55●ジョーストローク直径(mm):16●把持力(N)外径:1510●把持力(N)内径:1750●タイプ:3爪●繰り返し精度(mm):±0.015材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量1.2kg
242,000 ~
|
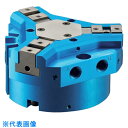
 337761 北川鉄工所 北川 平行用ロボットハンド(2爪) 〔品番:NTS220〕 [本体質量:5.14kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●高品質高耐久のスタンダードモデルです。●切粉対策強化とメンテナンス性の向上を実現しています。●高把持力で重量ワークも安定した把持が可能です。●高剛性ボディー採用により把持精度向上を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):2870●把持力閉側(N):2700●動作ストローク(mm):40●幅(mm):235●奥行(mm):100●高さ(mm):97●ジョーストローク直径(mm):40●把持力(N)外径:2700●把持力(N)内径:2870●タイプ:2爪●繰り返し精度(mm):±0.01材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量5.14kg
240,900 ~
|
 337761 北川鉄工所 北川 平行用ロボットハンド(3爪) 〔品番:NTS317〕 [本体質量:4.53kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●高品質高耐久のスタンダードモデルです。●切粉対策強化とメンテナンス性の向上を実現しています。●高把持力で重量ワークも安定した把持が可能です。●高剛性ボディー採用により把持精度向上を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):6900●把持力閉側(N):6400●動作ストローク(mm):32●幅(mm):197●奥行(mm):197●高さ(mm):86●ジョーストローク直径(mm):32●把持力(N)外径:6400●把持力(N)内径:6900●繰り返し精度(mm):±0.01●タイプ:3爪材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量4.53kg
234,300 ~
|
 337761 北川鉄工所 北川 平行中空ロボットハンド(3爪) 〔品番:NTB309〕 [本体質量:0.7kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●大貫通穴により治具取り付けに最適です。●切粉対策強化とメンテナンス性の向上を実現しています。●高把持力で重量ワークも安定した把持が可能です。●高剛性ボディー採用により把持精度向上を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):1270●把持力閉側(N):1110●動作ストローク(mm):12●幅(mm):97●奥行(mm):97●高さ(mm):46●ジョーストローク直径(mm):12●把持力(N)外径:1110●把持力(N)内径:1270●繰り返し精度(mm):±0.015●タイプ:3爪材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量0.7kg
222,200 ~
|
 337761 北川鉄工所 北川 ロボットハンド NPGTシリーズ 〔品番:NPGT10〕 [本体質量:1.25kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●薄型ボディー採用により、自由度の高いシステム設計が可能です。●チャック設計の技術を生かし、高精度を実現しています。●同等ストローク汎用モデルより高い把持力を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):860●把持力閉側(N):1000●動作ストローク(mm):20.8●幅(mm):120.4●奥行(mm):95.5●高さ(mm):42●ジョーストローク直径(mm):20.8●把持力(N)外径:1000●把持力(N)内径:860●タイプ:2爪●繰り返し精度(mm):±0.008材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量1.25kg
222,200 ~
|
 24V / 0.3Nm / 4,583rpm / BLDC / RS-485 / Multi-turn encoder 【特徴】 ・高性能フレームレスモーター ・多回転アブソリュートエンコーダ ・安全のための統合電気ブレーキ ・中空軸によるコンパクト&シンプルなデザイン ・ダイナミックモーターコントローラー 【商品説明】 YM070-210-M001-RHは減速機を含まず、目的に応じて減速機、リニアアクチュエータ、サーボシリンダーなど様々な製品と組み合わせて使用することができます。 【パッケージ構成】 ・YM070-210-M001-RH×1 ・Robot Cable-2P-X4P 600mm(Convertible)×1 ・Robot Cable-2P 600mm×1 ・Cord End Terminal×4 ・Terminal Plug×2 ・Wrench Bolt WB M2X6×10 ・Wrench Bolt WB M3x8×10 【納期】 約2ヶ月(受注生産)
213,200 ~
|
 【特徴】 DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。 DYNAMIXEL-Pシリーズは、着脱可能な減速サイクロイドギヤを採用し、高精度と耐衝撃性を実現しました。 - 電流検出に基づくトルク制御 - 位置、トルク、速度ベースのコマンド - インクリメンタルエンコーダと非接触アブソリュートエンコーダの組み合わせによる高分解能 - 耐久性の高いフルメタルハウジング - フルサイズのマニピュレーター、パンチルト、ヒューマノイドなどの作成に使用できます。 [DYNAMIXEL PRO -> P] アップグレード詳細 ・ 改良されたデザインと JST コネクタの適用 ・ 汚れの流入と漏れの改善 ・ コントロールテーブルの改良(Xシリーズ機能をサポート) ・ 応答性や分解能などの制御性能の向上 ・ 通信応答性の向上 ・ 熱、騒音、耐久性の向上 【パッケージ内容】 ・PM54-040-S250-R×1 ・Robot Cable-X4P 300mm(Convertible)×1 ・Robot Cable-X4P 300mm×1 ・Power Cable-2P 600mm×1 ・Wrench Bolt WB M3x8×20 【対応製品】 コントローラ:OpenCM 485 拡張ボード、OpenCR1.0 インターフェース:USB2Dynamixel、U2D2 【工場出荷時の設定】 ID : 1 ボーレート : 57600bps (環境に応じてIDやボーレートなどの各種設定を変更可能) 【仕様】 Model Name PM54-040-S250-R MCU Cortex-M4 (168 [Mhz], 32 [bit]) Input Voltage Min. [V] - Recommended [V] 24.0 Max. [V] - Performance Characteristics Voltage [V] 24.0 Stall Torque [N・m] - Stall Current [A] - No Load Speed [rpm] 28.4 No Load Current [A] 1.32 Continuous Operation Voltage [V] 24.0 Torque [N・m] 3.9 Speed [rpm] 24.2 Current [A] 1.9 Resolution Resolution [deg/pulse] 0.0007 Step [pulse] 502 Angle [degree] 360 Position Sensor Contactless absolute encoder Incremental encoder Operating Temperature Min. [°C] -5 Max. [°C] 55 Motor BLDC (Maxon) Baud Rate Min. [bps] 9,600 Max. [bps] 10,500,000 Control Algorithm PID Gear Type Cycloid Gear Material Metal Case Material Metal Dimensions (W×H×D) [mm] 54.0 X 108.0 X 54.0 Dimensions (W×H×D) [inch] 2.13 x 4.25 x 2.13 Weight [g] 0.00 Weight [oz] 25.04 Gear Ratio 251.4 : 1 Command Signal Digital Packet Protocol Type Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) Link (Physical) RS485 Multi Drop Bus ID 0 ~ 252 Feedback Position, Velocity, Current, Temperature, Voltage, External Port, etc Protocol version Protocol 2.0 Modbus Operating Mode / Angle Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode:360 [deg] Extended Position Control Mode: PWM Control Mode:Endless turn Output [W] 40 Standby Current [mA] 40
202,400 ~
|
 メカトロ部品LUR-213LUR-321LSH-A06D1L-HP1LSH-A06D1N-HP1LSH-A06D1R-HP1LSH-A10D1L-HP1LSH-A10D1N-HP1LSH-A10D1R-HP1LSH-A16D1L-HP1LSH-A16D1N-HP1LSH-A16D1R-HP1LSH-A20D1L-HP1LSH-A20D1N-HP1LSH-A20D1R-HP1LSH-A25D1L-HP1LSH-A25D1N-HP1LSH-A25D1R-HP1LSH-A32D1L-HP1LSH-A32D1N-HP1LSH-A32D1R-HP1≪類似品 前 40個 ≪類似品 前20個類似品後 20個≫類似品後 40個≫ メカトロ部品898171 ビー・エル・オートテック BL ロックアップRCCデバイス LUR−321 〔品番:LUR-321〕 [本体質量:560g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(外紺) オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様・サイズ・寸法など【各方向剛性】KL:水平(X・Y)方向 32.1kgf/cmRC:角度(θ)方向 20,700kgf・cm/radKA:軸(Z)方向 5,360kgf/cmRT:回転(α)方向 310kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:2●646N(270kgf)●引張方向:264N(27kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコードコロンコード6465398000コロン名称BL 商品本体質量560g
198,000 ~
|
 337761 北川鉄工所 北川 ロボットハンド NPGTシリーズ 〔品番:NPGT08〕 [本体質量:0.79kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●薄型ボディー採用により、自由度の高いシステム設計が可能です。●チャック設計の技術を生かし、高精度を実現しています。●同等ストローク汎用モデルより高い把持力を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):500●把持力閉側(N):600●動作ストローク(mm):16.6●幅(mm):99●奥行(mm):83●高さ(mm):37●ジョーストローク直径(mm):16.6●把持力(N)外径:600●把持力(N)内径:500●タイプ:2爪●繰り返し精度(mm):±0.008材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量0.79kg
193,600 ~
|
 新「Ver.3」ダークグレーカラー! 「KHR-3HV Ver.3 リフェバッテリー付セット」に拡張用サーボ5個セット、各種センサー類、KRC-5FHを組み合わせたフルセット。 人間らしい動きを無線操縦できる一番楽しいセットです。 それぞれバラで揃えるよりお得になっています。 パーフェクトパック 内容 ・03210 KHR-3HV Ver.3組立キット ×1 ・03199 KHR-3HV拡張用サーボ5個セット Ver.3 ×1 ・03099 KRC-5FH ×1 ・03213 KRG-5 Aセット(ジャイロセンサー) ×1 ・03122 RAS-3 Aセット加速度センサー ×1 ・02245 ROBOパワーセル F3-850タイプ(Li-Fe) ×1 当店でご注文頂いた方へは、 ●とっても便利な「印刷済みマニュアル」 (KHR-3HV組立説明書77ページ、HTH4ユーザーズマニュアル58ページ) ●即実戦で使えるバトルモーションパッケージ をもれなくプレゼント! ●あると便利な物---ドライバー(+0番、+1番) ※「ガチバトル for KHR-3HV22-1」は、サーボモーターの通信速度を初期設定の115200bpsに合わせています。通信速度の変更を行った場合は各モーションの微調整が必要です。
189,860 ~
|
 オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−321 〔品番:LUR321〕[ 注番:1979174]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 32.1kgf/cmRC:角度(θ)方向 20,700kgf・cm/radKA:軸(Z)方向 5,360kgf/cmRT:回転(α)方向 310kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:2●646N(270kgf)●引張方向:264N(27kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量560gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−321 〔品番:LUR321〕[注番:1979174][本体質量:560g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
185,900 ~
|
 オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−321 〔品番:LUR321〕[ 注番:1979174]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 32.1kgf/cmRC:角度(θ)方向 20,700kgf・cm/radKA:軸(Z)方向 5,360kgf/cmRT:回転(α)方向 310kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:2●646N(270kgf)●引張方向:264N(27kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量560gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−321 〔品番:LUR321〕[注番:1979174][本体質量:560g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
185,900 ~
|
 337761 北川鉄工所 北川 平行用ロボットハンド(2爪) 〔品番:NTS216〕 [本体質量:2.52kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●高品質高耐久のスタンダードモデルです。●切粉対策強化とメンテナンス性の向上を実現しています。●高把持力で重量ワークも安定した把持が可能です。●高剛性ボディー採用により把持精度向上を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):1690●把持力閉側(N):1520●動作ストローク(mm):32●幅(mm):187●奥行(mm):72●高さ(mm):82●ジョーストローク直径(mm):32●把持力(N)外径:1520●把持力(N)内径:1690●繰り返し精度(mm):±0.01●タイプ:2爪材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量2.52kg
184,800 ~
|
 【中古】Palmi(パルミー) 二足歩行 コミュニケーション ロボット当店取り扱いの中古品についてこちらの商品は中古品となっております。 付属品の有無については入荷の度異なり、商品タイトルに付属品についての記載がない場合もございますので、ご不明な場合はメッセージにてお問い合わせください。 買取時より付属していたものはお付けしておりますが、付属品や消耗品に保証はございません。中古品のため、使用に影響ない程度の使用感・経年劣化(傷、汚れなど)がある場合がございますのでご了承下さい。また、中古品の特性上ギフトには適しておりません。当店は専門店ではございませんので、製品に関する詳細や設定方法はメーカーへ直接お問い合わせいただきますようお願い致します。 画像はイメージ写真です。ビデオデッキ、各プレーヤーなど在庫品によってリモコンが付属してない場合がございます。限定版の付属品、ダウンロードコードなどの付属品は無しとお考え下さい。中古品の場合、基本的に説明書・外箱・ドライバーインストール用のCD-ROMはついておりませんので、ご了承の上お買求め下さい。当店での中古表記のトレーディングカードはプレイ用でございます。中古買取り品の為、細かなキズ・白欠け・多少の使用感がございますのでご了承下さいませ。ご返品について当店販売の中古品につきまして、初期不良に限り商品到着から7日間はご返品を受付けておりますので 到着後、なるべく早く動作確認や商品確認をお願い致します。1週間を超えてのご連絡のあったものは、ご返品不可となりますのでご了承下さい。中古品につきましては商品の特性上、お客様都合のご返品は原則としてお受けしておりません。ご注文からお届けまでご注文は24時間受け付けております。当店販売の中古品のお届けは国内倉庫からの発送の場合は3営業日〜10営業日前後とお考え下さい。 海外倉庫からの発送の場合は、一旦国内委託倉庫へ国際便にて配送の後にお客様へお送り致しますので、お届けまで3週間から1カ月ほどお時間を頂戴致します。※併売品の為、在庫切れの場合はご連絡させて頂きます。※離島、北海道、九州、沖縄は遅れる場合がございます。予めご了承下さい。※ご注文後、当店より確認のメールをする場合がございます。ご返信が無い場合キャンセルとなりますので予めご了承くださいませ。
184,240 ~
|
 完全完成済み。ロボット初心者の方でもすぐに動かすことが可能。身長16.5センチで世界最小のヒューマノイド型2足歩行ロボット。(2007/1月タカラトミー調査)オリジナルの小型高性能サーボモーター を17個搭載。ジャイロセンサー搭載により、バランス感覚も抜群!自動バランス補正を実現する。音声認識+スピーカー搭載、状況により言葉、効果音、音楽を出しながらアクションを行う。約160種のセリフと60種の効果音が入っている。 セット内容: アイソボット本体×1、コントローラー×1、単4型ニッケル水素充電池×3、充電器×1、ヘキサゴンレンチ×1、取り扱い説明書×1、保証書×1新品です。 希少商品となりますので、定価よりお値段が高い場合がございます。 販売済みの場合は速やかに在庫の更新を行っておりますが、時間差等にて先に他店舗での販売の可能性もございます。在庫切れの際はご了承下さい。 当店、海外倉庫からのお取り寄せとなる場合もあります。その場合、発送に2〜4週間前後かかる場合があります。 原則といたしまして、お客様のご都合によるキャンセルはお断りさせていただいております。 ただし、金額のケタの読み間違いなども加味し、12時間以内であればキャンセルを受け付けております。 ※万が一、メーカーもしくは店舗などに在庫が無い場合、誠に申し訳ありませんがキャンセルさせて頂きます。何卒、ご理解いただきますようよろしくお願いいたします。
170,267 ~
|
 お得な6個セット <スペック> (12.0V時) ●最大トルク:6.18[Nm] (63.0[kgf・cm] ) ●無負荷回転数:64[rpm](0.15[s/60°]) (11.1V時) ●最大トルク:5.75[Nm] (58.6[kgf・cm] ) ●無負荷回転数:59[rpm](0.17[s/60°]) ●寸法:54.5×32.5×32(突起部除く) ●ケース種類:PMX-5200シリーズ ●重量:94[g] ●最大動作角度:±320[degree] ※位置制御モード時 ●動作電圧:安定した電源で9V~12V ●待機電流:21[mA](12.0V時) ●最大ストール電流:3.9[A](12.0V時) ●減速比:362.88:1 ●ギヤ種類:特殊アルミギヤ ステンレスギヤ(3rdギア) スチール(ピニオンのみ) ●ケース材質:アルミ(トップ、ミドル) ガラス入り樹脂(ボトム) ●動作環境温度:0~40[℃] ●制御分解能:16bit/1round(0~65535) ●インターフェース:RS-485準拠 ●通信速度:3M, 2M, 1.5M, 1.25M, 1M, 115.2K, 57.6Kbps ●ID:0~239 ●パリティ:なし, 奇数, 偶数 ●初期値:ID0, 115.2Kbps, パリティなし ●動作方式:位置制御、速度制御、トルク制御、電流制御、PWM制御 <接続機器> ●RS-485 USBアダプターHS ●RS-485変換基板 <付属品> HC-6P接続ケーブル(400mm) ×6本 Made in Japan
168,080 ~
|
 お得な6個セット <スペック> (12.0V時) ●最大トルク:4.08[Nm] (41.6[kgf・cm] ) ●無負荷回転数:95[rpm](0.10[s/60°]) (11.1V時) ●最大トルク:3.78[Nm] (38.6[kgf・cm] ) ●無負荷回転数:87[rpm](0.11[s/60°]) ●寸法:54.5×32.5×32(突起部除く) ●ケース種類:PMX-5200シリーズ ●重量:93[g] ●最大動作角度:±320[degree] ※位置制御モード時 ●動作電圧:安定した電源で9V~12V ●待機電流:21[mA](12.0V時) ●最大ストール電流:3.9[A](12.0V時) ●減速比:237.6:1 ●ギヤ種類:特殊アルミギヤ ステンレスギヤ(3rdギア) スチール(ピニオンのみ) ●ケース材質:アルミ(トップ、ミドル) ガラス入り樹脂(ボトム) ●動作環境温度:0~40[℃] ●制御分解能:16bit/1round(0~65535) ●インターフェース:RS-485準拠 ●通信速度:3M, 2M, 1.5M, 1.25M, 1M, 115.2K, 57.6Kbps ●ID:0~239 ●パリティ:なし, 奇数, 偶数 ●初期値:ID0, 115.2Kbps, パリティなし ●動作方式:位置制御、速度制御、トルク制御、電流制御、PWM制御 <接続機器> ●RS-485 USBアダプターHS ●RS-485変換基板 <付属品> HC-6P接続ケーブル(400mm) ×6本 Made in Japan
168,080 ~
|

 メカトロ部品LUR-213LUR-321LSH-A06D1L-HP1LSH-A06D1N-HP1LSH-A06D1R-HP1LSH-A10D1L-HP1LSH-A10D1N-HP1LSH-A10D1R-HP1LSH-A16D1L-HP1LSH-A16D1N-HP1LSH-A16D1R-HP1LSH-A20D1L-HP1LSH-A20D1N-HP1LSH-A20D1R-HP1LSH-A25D1L-HP1LSH-A25D1N-HP1LSH-A25D1R-HP1LSH-A32D1L-HP1LSH-A32D1N-HP1LSH-A32D1R-HP1≪類似品 前 40個 ≪類似品 前20個類似品後 20個≫類似品後 40個≫ メカトロ部品898171 ビー・エル・オートテック BL ロックアップRCCデバイス LUR−213 〔品番:LUR-213〕 [本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(外紺) オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様・サイズ・寸法など【各方向剛性】KL:水平(X・Y)方向 30.4kgf/cmRC:角度(θ)方向 7,600kgf・cm/radKA:軸(Z)方向 3,210kgf/cmRT:回転(α)方向 240kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:1●274N(130kgf)●引張方向:137N(14kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコードコロンコード6465398000コロン名称BL 商品本体質量380g
167,200 ~
|
 メカトロ部品K20A-TRCC-001-BSRCC-001-BSLRCC-111-BSRCC-112-BSRCC-113-BSRCC-211-BSRCC-212-BSRCC-213-BSRCC-321-RSPN-ZEROPN-ZEROPN-ZEROPN-ZEROPN-ZEROLUR-111LUR-112LUR-113LUR-211LUR-212≪類似品 前 40個 ≪類似品 前20個類似品後 20個≫類似品後 40個≫ メカトロ部品898171 ビー・エル・オートテック BL ロックアップRCCデバイス LUR−211 〔品番:LUR-211〕 [本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(外紺) オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様・サイズ・寸法など【各方向剛性】KL:水平(X・Y)方向 17.9kgf/cmRC:角度(θ)方向 4,720kgf・cm/radKA:軸(Z)方向 3,210kgf/cmRT:回転(α)方向 86kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:1●274N(130kgf)●引張方向:137N(14kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコードコロンコード6465398000コロン名称BL 商品本体質量380g
167,200 ~
|
 メカトロ部品K20A-TRCC-001-BSRCC-001-BSLRCC-111-BSRCC-112-BSRCC-113-BSRCC-211-BSRCC-212-BSRCC-213-BSRCC-321-RSPN-ZEROPN-ZEROPN-ZEROPN-ZEROPN-ZEROLUR-111LUR-112LUR-113LUR-211LUR-212≪類似品 前 40個 ≪類似品 前20個類似品後 20個≫類似品後 40個≫ メカトロ部品898171 ビー・エル・オートテック BL ロックアップRCCデバイス LUR−212 〔品番:LUR-212〕 [本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(外紺) オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様・サイズ・寸法など【各方向剛性】KL:水平(X・Y)方向 9.8kgf/cmRC:角度(θ)方向 2,760kgf・cm/radKA:軸(Z)方向 1,340kgf/cmRT:回転(α)方向 63kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:490N(50kgf)●引張方向:137N(14kgf)●可搬重量(参考)●49N(5kg)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコードコロンコード6465398000コロン名称BL 商品本体質量380g
167,200 ~
|

 お得な6個セット <スペック>(11.1V時) ●最大トルク:90.9kgf・cm ●最高スピード:0.23s/60° ●寸法:51.5×32×39.5mm(突起部除く) ●重量:104g(本体のみ) ●最大動作角度:270° ●最大消費電流:6.1A ●ギヤ種類:特殊アルミギヤ+ステンレスギヤ ●ケース材質:アルミ(トップ、ミドル) ガラス入り樹脂(ボトム) ●ギヤ比:362.88:1 ●電源電圧:HV仕様(9V〜12V) ●通信規格:ICS3.6(シリアル/PWM選択式) ●通信速度:115200/625000/1250000bps ●初期設定:ID0/BR115200 ●信号レベル:TTL ●回転モード:可 ※2023年10月20日 センサの軸が樹脂タイプに変更になりました。 <対応コントロールボード> ●RCB-4HV ●KCB-5 ●RCB-3HV <インターフェース> ●Dual USBアダプターHS ●ICS USBアダプターHS <中継基板> ●ICS変換基板 <付属品> HV接続ケーブル(400mm)×6本 Made in Japan
163,680 ~
|
新「Ver.3」ダークグレーカラー! 「KHR-3HV Ver.2 リフェバッテリー付セット」に拡張用サーボ5個セットを組み合わせたパック。 ダミーサーボが入る部分に拡張用サーボを使えば、初めから22軸ロボットとして組上げられます。 追加軸は、腰ヨー軸、脚付け根ヨー軸(左右)、腕ヨー軸(左右)です。 5ヵ所追加することにより、腰のひねり、足上げ旋回、腕のひねりなど、格段に人の動作に近い動きができるようになります。 22軸拡張パック 内容 ・03210 KHR-3HV Ver.3組立キット ×1 ・03199 KHR-3HV拡張用サーボ5個セットVer.3 ×1 当店でご注文頂いた方へは、 ●とっても便利な「印刷済みマニュアル」 (KHR-3HV組立説明書77ページ、HTH4ユーザーズマニュアル58ページ) ●即実戦で使えるバトルモーションパッケージ をもれなくプレゼント! ●あると便利な物---ドライバー(+0番、+1番) ※「ガチバトル for KHR-3HV22-1」は、サーボモーターの通信速度を初期設定の115200bpsに合わせています。通信速度の変更を行った場合は各モーションの微調整が必要です。
159,500 ~
|
 オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−211 〔品番:LUR211〕[ 注番:1979170]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 17.9kgf/cmRC:角度(θ)方向 4,720kgf・cm/radKA:軸(Z)方向 3,210kgf/cmRT:回転(α)方向 86kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:1●274N(130kgf)●引張方向:137N(14kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量380gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−211 〔品番:LUR211〕[注番:1979170][本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
157,300 ~
|
 オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−213 〔品番:LUR213〕[ 注番:1979169]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 30.4kgf/cmRC:角度(θ)方向 7,600kgf・cm/radKA:軸(Z)方向 3,210kgf/cmRT:回転(α)方向 240kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:1●274N(130kgf)●引張方向:137N(14kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量380gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−213 〔品番:LUR213〕[注番:1979169][本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
157,300 ~
|
 オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−212 〔品番:LUR212〕[ 注番:1979172]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 9.8kgf/cmRC:角度(θ)方向 2,760kgf・cm/radKA:軸(Z)方向 1,340kgf/cmRT:回転(α)方向 63kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:490N(50kgf)●引張方向:137N(14kgf)●可搬重量(参考)●49N(5kg)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量380gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−212 〔品番:LUR212〕[注番:1979172][本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
157,300 ~
|
 337761 北川鉄工所 北川 平行用ロボットハンド(3爪) 〔品番:NTS313〕 [本体質量:2.25kg]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報:在庫色(紺) メーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】 ※北海道・沖縄・離島は運賃別途商品も含む特長●高品質高耐久のスタンダードモデルです。●切粉対策強化とメンテナンス性の向上を実現しています。●高把持力で重量ワークも安定した把持が可能です。●高剛性ボディー採用により把持精度向上を実現しています。用途●産業用ロボット専用。仕様●把持力開側(N):3400●把持力閉側(N):3180●動作ストローク(mm):24●幅(mm):149●奥行(mm):149●高さ(mm):67●ジョーストローク直径(mm):24●把持力(N)外径:3180●把持力(N)内径:3400●繰り返し精度(mm):±0.01●タイプ:3爪材質/仕上セット内容/付属品注意原産国(名称)日本JANコードコロンコード2139988000コロン名称北川 ロボット本体質量2.25kg
157,300 ~
|
 オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−211 〔品番:LUR211〕[ 注番:1979170]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 17.9kgf/cmRC:角度(θ)方向 4,720kgf・cm/radKA:軸(Z)方向 3,210kgf/cmRT:回転(α)方向 86kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:1●274N(130kgf)●引張方向:137N(14kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量380gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−211 〔品番:LUR211〕[注番:1979170][本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
157,300 ~
|
![]() オレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−211 〔品番:LUR211〕[ 注番:1979170]特長●組立・挿入動作に発生する水平方向及び角度方向の 誤差を修正し、かじりやこじりによる不良やロスタイムを軽減することが可能です。●従来のRCCデバイスにフローティング状態を空気圧でロックアップする機構を追加しました。用途●位置誤差修正装置仕様剛性】KL:水平(X・Y)方向 17.9kgf/cmRC:角度(θ)方向 4,720kgf・cm/radKA:軸(Z)方向 3,210kgf/cmRT:回転(α)方向 86kgf・cm/rad【ロック時繰り返し精度】±0.1mm(軸垂直姿勢で無負荷の場合)【使用温度・湿度範囲】0〜55℃、0〜90%(結露なきこと)仕様2●誤差修正量●水平(X・Y)方向:±2mm●角度(θ)方向:±1deg●軸(Z)方向:±0.5mm●回転(α)方向:±6deg●許容荷重●圧縮方向:1●274N(130kgf)●引張方向:137N(14kgf)●可搬重量(参考)材質/仕上●本体:アルミニウム合金●マウント:ゴムエレメントセット内容/付属品注意原産国(名称)日本JANコード本体質量380gオレンジブック トラスコ中山 TRUSCOBL ロックアップRCCデバイス LUR−211 〔品番:LUR211〕[注番:1979170][本体質量:380g]分類》メカトロ部品》軸受・駆動機器・伝導部品》ロボットハンド用パーツ☆納期情報: オレンジブック掲載以外でメーカー直送品(送料元払い)【法人限定=会社名ご記入お願い致します。】※北海道・沖縄・離島は運賃別途商品も含む
157,300 ~
|
           
 PCレイアウトで
PCレイアウトで
SPレイアウトで

|
